2018年12月13日に行われた“進捗報告会”では、ジュニパーネットワークスでエンジニアリング担当最高技術責任者(CTO)を務めるキリーティ・コンペラ氏が「セルフドライビングネットワーク」の目的と技術要素、仕組みについて説明した。

ジュニパーネットワークス エンジニアリング担当最高技術責任者(CTO)キリーティ・コンペラ氏
ネットワークの自律運転を目指す目的について同氏は、「スピードと信頼性、効率化の3つすべてを達成したい」と述べた。構成変更や性能改善に伴う作業を自動化することで迅速なサービス提供が可能になり、また、AIや機械学習技術を用いて故障や障害の発生を予測して事前に対処することで、ネットワークそのものの信頼性も高まる。これを、オペレーションの効率化と両立しながら実現することができるという。
ジュニパーはネットワーク運用管理のライフサイクル全体を自動化する「完全自動運転」を目指しているという。そこまでには、下の図のように5段階のステップを設定しており、現在は【レベル5】(=完全自動運転)の一歩手前の【レベル4】に到達していると述べた。
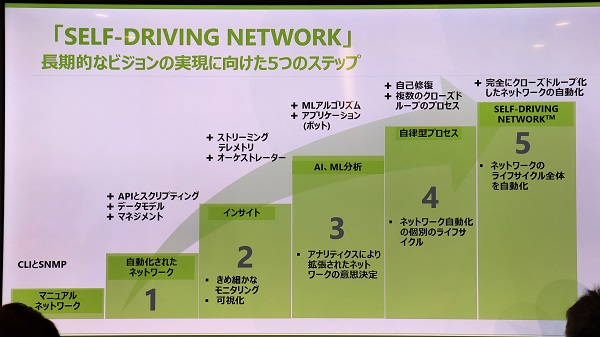
セルフドライビングネットワークの実現に向けた5つのステップ
「自動運転車」とアプローチは同じ?
ネットワークの自律運転はどのようにして実現されるのか。コンペラ氏はクルマの自動運転になぞらえて次のように説明した。
自動運転車はブレーキや速度制御、ステアリング、トランスミッションといった各種機能をそれぞれ自律型とすることで成り立っているという。セルフドライビングネットワークも同じように、モニタリングや診断、コンフィグ作成、プロビジョニング、ソフトウェアアップデートといった「1つ1つの機能要素を自律型にしていく」ことで実現する。
自動化の手順は次のようなものだ。
まず、ネットワークで何が起こっているのかを知るため、リアルタイムにテレメトリ情報を集める。このデータを分析し、サービス要求に照らして必要なアクション(制御)を行う。これを前述の機能要素ごとに行う。コンペラ氏は「1つ1つの機能のなかがクローズドループになっている。各機能によって必要なテレメトリ情報は異なる」と話す。
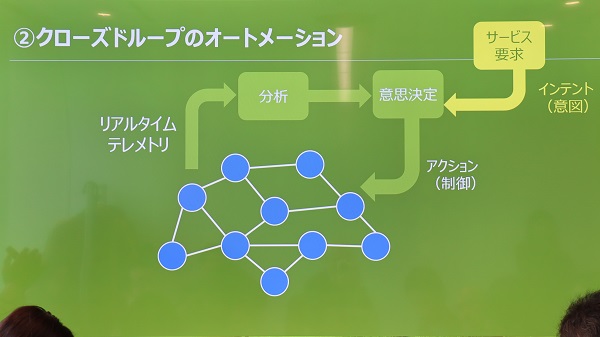
機能ごとに、テレメトリ情報収集→分析→意思決定→アクションまでを自動化する
このように、ネットワーク運用のタスク全体を細かな機能に分解し、それぞれについて上の一連のループを実行する「ネットワークボット」(ボットはソフトウェアロボットのこと)を作る。ネットワークデバイスの健康状態を診断する「Health Bot」や、ピアリングを行う「Peer Bot」が、人間の代わりにネットワーク内で働くというわけだ。
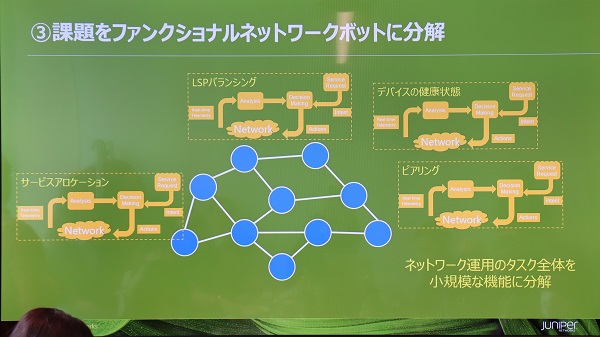
ネットワーク内で複数のボットが活動する
各ボットは、高次のシステムであるオペレーションサポートシステム(OSS)やオーケストレータ/コントローラーが管理・制御する。