NTT東日本は1月17日、オリィ研究所が運営する「分身ロボットカフェDAWN ver.β」常設実験店(東京都中央区)で行っていたローカル5Gと遠隔品質制御技術を用いた遠隔ロボット操作の実証実験の成果を公表した。遠隔地の操作者が通信遅延によるタイムラグを感じずに、自然な遠隔ロボット操作を行うことができたという。
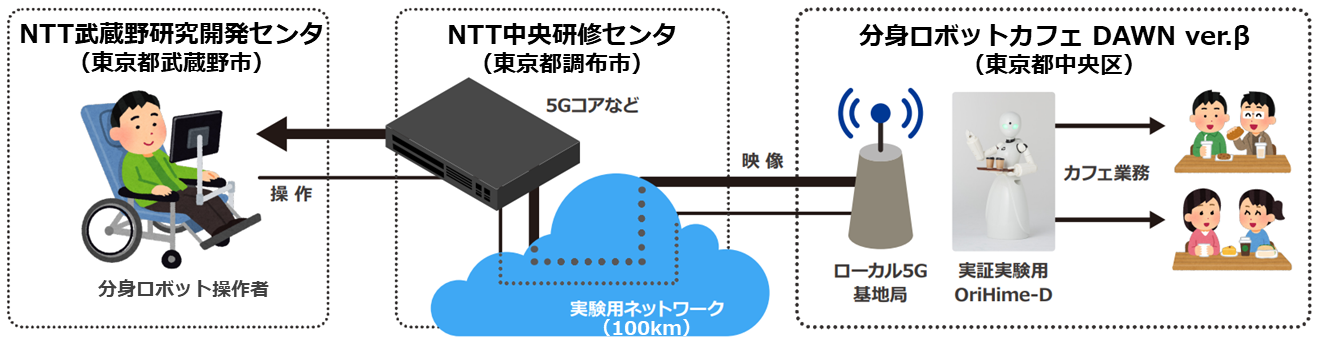
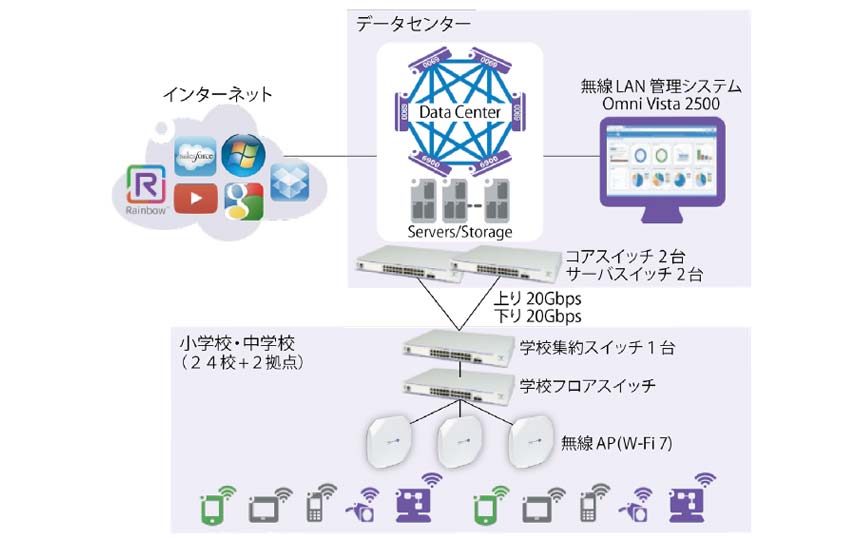
実証実験の構成図
この実証実験は、NTT持株を含む3者で2021年6月から取り組んでいるもの。「分身ロボットカフェDAWN ver.β」常設実験店(以下、店舗)では、オリィ研究所が開発した分身ロボット「OriHime-D」を、遠隔地にいる難病や重度障害のため外出が困難な従業員が遠隔操作することにより接客や配膳などの業務を行う(参考:NTT東が分身ロボを使う理由――介護と仕事の両立も支援)。
分身ロボットには音声・映像によるコミュニケーションや、人や障害物を避けるなどの精密な移動が求められる。店舗内のロボットはWi-Fiに接続していたが、外部電波との干渉によるタイムラグや通信断が起こり、従業員のストレスが増大したり操作精度が低下したりといった課題があった。
この課題を解決するため、外部電波の影響を受けにくいローカル5G環境を店舗内に構築し、NTTが開発した通信品質を制御する技術を組み合わせ、ロボットを遠隔操作する実証実験を行った。店舗とNTT武蔵野研究開発センタ(東京都武蔵野市)、NTT中央研修センタ(東京都調布市)の3箇所を全長100kmの光ファイバーで接続。障害のある操作者が武蔵野研究開発センタから店舗のスタッフ業務を行い、その際のロボット操作感、アプリケーション間でのネットワーク性能評価を行った。

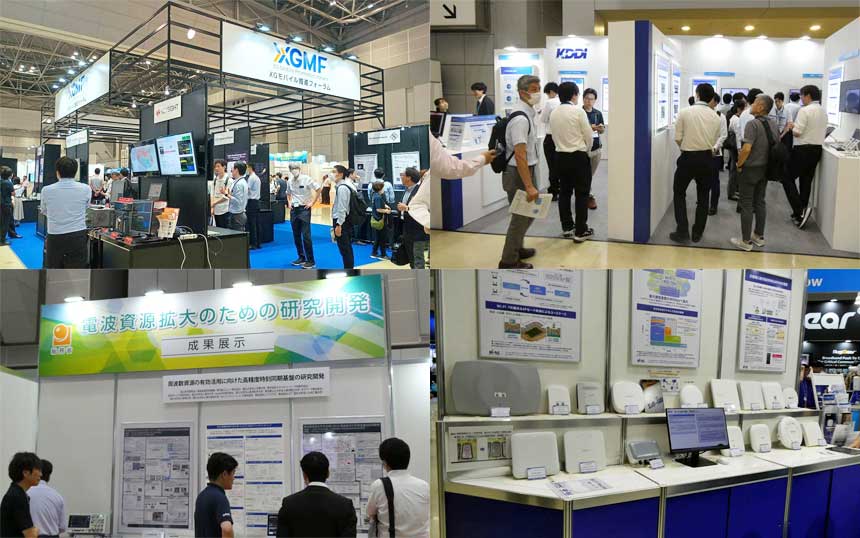
分身ロボットカフェでの実証実験の様子(左)、NTT武蔵野研究開発センタの操作者(右)
その結果、無線通信の切断や、映像品質の劣化による遠隔操作のしづらさは解消され、分身ロボットの操作性向上効果が確認できたという。また、数十ms以上の遅延量増加が発生する大容量のダミートラフィックをローカル5Gへ付加した条件下で実験を行ったところ、NTTが開発した通信品質制御技術を分身ロボットに関わる通信に適用することで、付加されたダミートラフィックの影響を受けることのない低遅延性能を維持できることを確認できたとのことだ。
この実証実験の成果は、分身ロボットに留まらず、製造工場や建設現場等で稼動する遠隔操作産業ロボットなど、ネットワークの低遅延性能が求められる遠隔操作のユースケースへの展開が期待できるという。
なお、この実証実験で用いられた技術は、1月24日~1月26日に開催する「NTT東日本グループ Solution Forum 2023」で紹介される予定だ。