NTTドコモと慶應義塾大学ハプティクス研究センター(以下、慶大)は2025年10月7日、慶大が開発したロボティクス技術 「リアルハプティクス」を活用し、MECに搭載したネットワーク遅延対策機能とドコモの商用5Gのモバイルデータ通信を組み合わせ、物に触れた時の手応えが伝わるロボットの無線遠隔操作に日本で初めて成功したと発表した。

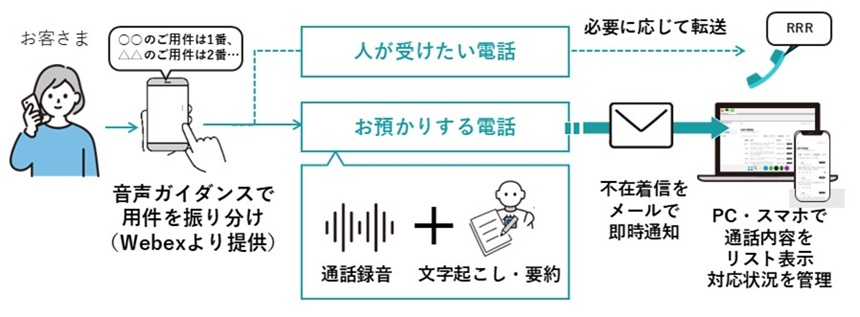
同実証で用いた技術で実現につながると期待されるユースケース(左︓リハビリ施術のリモート化、中央︓危険な場所での作業のリモート化、右︓家事のリモート化)
遠隔にいるロボットの操作者に遠隔ロボットが物をつかんだ時の感覚を詳細に伝えるためには、操作ロボットと遠隔ロボットをつなぐ低遅延かつ変動のないモバイルデータ通信が欠かせない。しかし、モバイルデータ通信の遅延や変動が大きいと、2台の装置間で物をつかんだ感覚や動作が同期できなくなり、リアルハプティクスが得意とする力加減の再現が適切に行えなかったり、ロボット操作が困難になるという課題があった。
今回の実証では、モバイルデータ通信の遅延や変動を抑えるため、ドコモが開発したジッターバッファ機能と、docomo MECのMECダイレクト機能(接続端末とMEC基盤を直結して通信経路を最適化することで、低遅延・高セキュリティ通信を実現する技術)、慶大が開発した通信遅延補償機能の3つの技術を組み合わせた。
これにより、モバイルデータ通信が遅延する環境であっても、リアルハプティクスによる力加減の再現が適切に行えることや、ロボット操作が滑らかに問題なくできることを検証したという。
同実証は、無線で遠隔操作するロボットのユースケース拡大や実装につながるほか、docomo MECを通じてサービスとして提供することで、ユーザーは無線遠隔ロボットソリューションおよびサービスの開発・運用をより少ない負担で行うことが可能となり、参入や導入のハードルが下がることが期待される。