2023年3月に商用サービスが始まった「APN IOWN 1.0」(以下、APN)は、通信ネットワークの全区間を光のまま通信することで、従来比200分の1という低遅延を実現している。
この特性を活かしたユースケースとして有望視されているものの1つが、ロボットの遠隔操縦だ。製造業では工作ロボット、医療業界では手術支援ロボットの遠隔操縦にAPNを適用しようとする取り組みが進んでいる。
APN(オールフォトニクス・ネットワーク)は中継点での光-電気変換を行わないため、この変換処理にかかる遅延を排除。さらに、変換がないため遅延のゆらぎ(ジッタ)もない。この「低遅延・ゆらぎなし」の特性は、ミッションクリティカルな用途での必須条件だ。
ただし、問題はそう簡単ではない。ロボット遠隔操縦にはAPNの低遅延だけで十分なのか――。そう問題提起するのは、NTTアクセスサービスシステム研究所(NTT AS研) 光アクセス基盤プロジェクト プロジェクトマネージャーの吉田智暁氏だ。
同氏は、2023年5月18日に開催された「つくばフォーラム2023」のワークショップで講演し、ロボット遠隔操縦の社会実装を推し進めるためにNTT AS研で行っている研究開発について紹介した。「APNの低遅延をもっと有効活用するために必要なもの」として吉田氏が挙げたのが次の2つの要素だ。エッジコンピューティングと「低遅延FDN(Function Dedicated Network)」である。
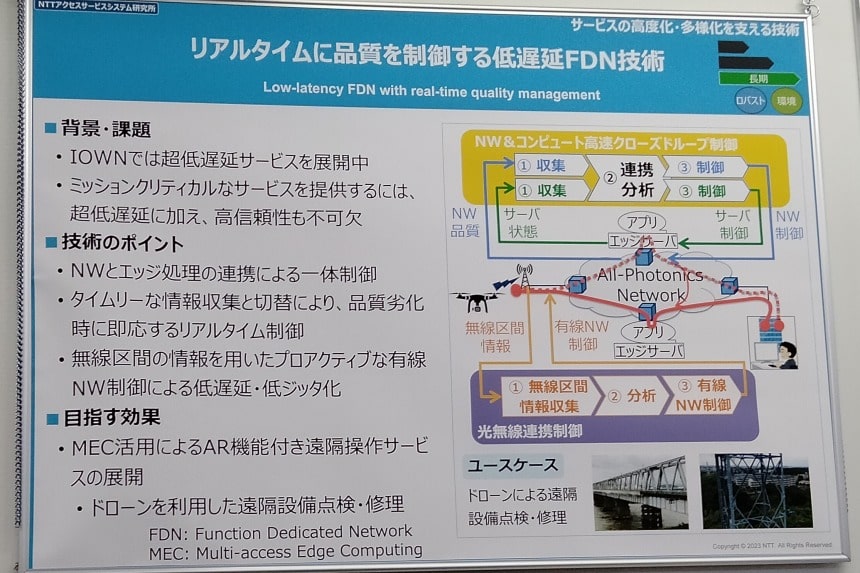
NTT AS研が開発中の「低遅延FDN」の概要
ロボット遠隔操縦の信頼性を高める「低遅延FDN」
ロボット遠隔操縦は、ロボットアーム等の動作や対象物の映像を見ながら、遠隔地にいるオペレーターが操作を行う。例えば、手術支援ロボットでは、往復の通信遅延と映像処理の遅延を合わせて「100ミリ秒」以下とすることが求められる。
さらに、ミッションクリティカル性が高い用途では、輻輳による通信品質の劣化や、映像処理サーバーの過負荷による遅延の増大は許されない。つまり、映像処理も含めたトータルの「低遅延と安定性の両方を実現する仕掛けがAPN以外に必要だ」(吉田氏)。
前述の1つめの要素であるエッジコンピューティングは、この映像処理をロボットの近くで行うことで、操縦者に対して表示する映像情報の伝送量を削減し、かつ、遅延の短縮にも貢献する。また、「複数ユーザーでエッジサーバーをシェアすることでコストを下げたり、ロボットに搭載するアプリケーションを軽くできるなどのメリットもある」。
もう1つの要素「低遅延FDN」はNTT AS研で開発中の技術だ。ネットワークとエッジサーバーの処理を一体的に制御することで、低遅延通信サービスの信頼性を高めることを目的としている。吉田氏によれば、(1)光無線連携制御と(2)NW&コンピュート高速クローズドループ制御」の2つの技術で構成される。