少子高齢化が進む日本は、近い将来、労働人口の減少が避けられない。人手不足対策として、ロボット活用に期待が集まっている。
この流れを加速しているのが、新型コロナウイルスの感染拡大だ。
感染リスクを減らすため“非接触”がニューノーマルな生活様式となっており、配達や清掃、警備など様々な分野で人間の作業を代替するロボットの需要が急速に高まっている。ここ数カ月、ロボットベンチャーも数多く立ち上がっているという。
ただ、ロボットが活躍する社会の実現には課題もある。
というのも、ロボットが乗り越えられる段差の幅は平均すると数cm程度とされ、街中の階段などの移動を苦手としているからだ。また、自律走行型ロボットはGPSを用いて現在地を把握しながら設定されたルートを走行するが、屋内ではGPSが使えず自律走行が難しい。
こうしたなか、慶應義塾大学環境情報学部の田中浩也教授は、ロボットが自由に動き回れる街づくりに向けて、「超高解像度3Dマップ」の研究に取り組んでいる。
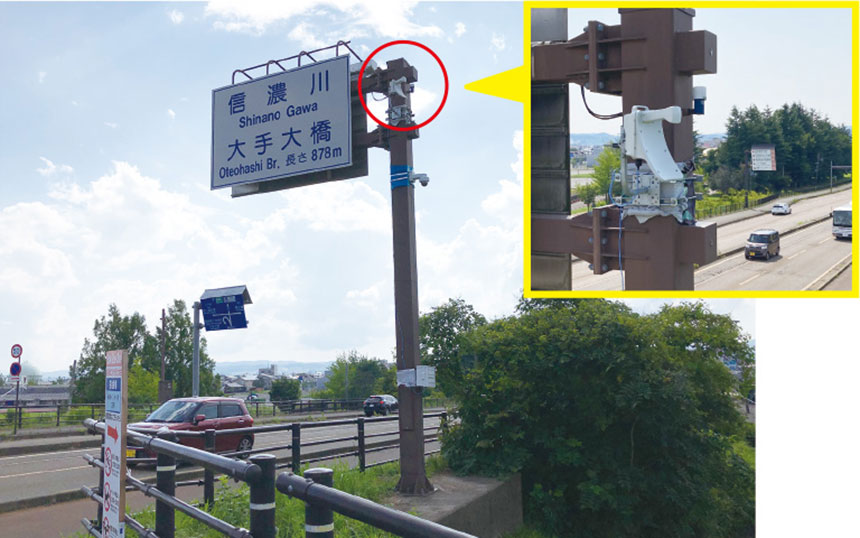
超高解像度3Dマップは、上空から衛星やドローン等で撮影した画像を基にした広域3Dマップに、地上から「LiDAR」(レーザー光を走査しながら対象物に照射し、その散乱や反射光を観測することで対象物の距離や位置・形状を計測するセンサー)でスキャンしたデータを重ねることで作成する。

超高解像度3Dマップは、LiDARを背負ってデータを収集して作成する
超高解像度3Dマップは、これまでの3Dマップと大きく2つの点で異なる。
1つめに、解像度は3Dマップの最大50cm程度に対し、超高解像度3Dマップは3cm以内と大幅な向上を実現することだ。これにより、従来の3Dマップでは難しかった、階段など数cm程度の段差の有無も表示することが可能になる。
2つめに、最大で1日1回と高い頻度で更新を行えることだ。一般的に、地図はいったん作成すると更新されるまでに長い期間を要するが、変化のスピードが速い都市部ではその間に現実空間が変わってしまう。しかし、超高解像度3Dマップなら、常に最新の情報を反映することができる。
ロボットの自律走行には、3Dマップを基にセンサーを使って位置を推定し、経路を決めるという方法もある。超高解像度3Dマップは屋外だけでなく屋内も数cm単位の段差まで詳細に表示するので、ロボットが通りやすい道をあらかじめ選択でき、スムーズな移動を実現すると言う。
ロボットの他にも、車イスやベビーカー、さらには高齢者の歩行補助具など、車輪の付いた低速の移動体(スローモビリティ)は数多くある。
現在の移動空間は、歩行者やクルマ、自転車を中心に整備されており、これらスローモビリティの移動には必ずしも適さない。
田中教授は「スローモビリティに小型LiDARを取り付けて日常的に使用することでデータを集め、スローモビリティを安全・快適に支えるインフラ整備のための3Dマップを作る必要がある」と強調する。
このようにロボットが走行する環境が整うと、3Dマップがさらに詳細になり、それが新たなロボット導入の“呼び水”になる─。田中教授は、ロ30kgの荷物を搭載することができ、駅構内の運搬作業以外にも、例えば高齢者の買い物補助などの用途が考えられるという。
「ロボットには二足歩行や四足歩行もあるが、日本が抱える社会課題のソリューションとしての活用には、この形がベストではないか」とSoftRoid共同創業者・エンジニアの山田駿氏は述べる。
運搬ロボットは今年秋から実証実験を始め、2021年にも実用化する予定だ。