NTT、NTT東日本、NTTアグリテクノロジーの3社は2025年5月12日、圃場にある収穫ロボットを遠隔操作し、イチゴを収穫する実証実験を実施したと発表した。同実証では、ネットワークの品質状況に応じたリアルタイムな動作制御により、高い操作性を維持した遠隔収穫作業が可能であることを確認したという。
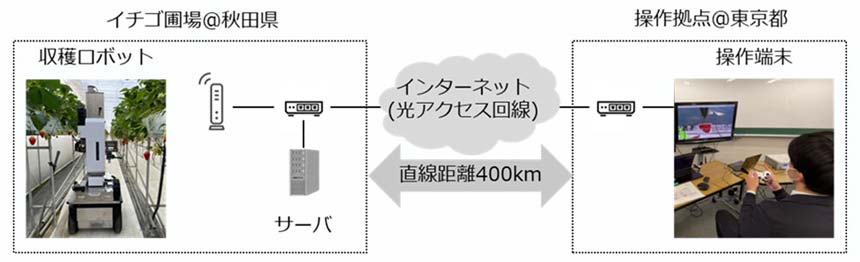
具体的には、秋田県のイチゴ圃場に収穫ロボットと画像処理用サーバーを設置し、東京都の拠点に操作端末を配置した。両拠点は直線距離で約400km離れており、光アクセス回線とインターネット回線で接続されている。この環境で、収穫ロボットを遠隔から精度高く操作し、イチゴを傷つけずに収穫できることを確認したという。
また、今回構築したシステムに、モニターの表示情報とロボットアームの速度をエンドツーエンドの遅延時間に応じて変更する機能を実装し、同機能がイチゴの収穫作業の操作性をどの程度向上させたのかを検証。イチゴの位置にロボットアームを1回の操作で正確に移動できた割合(成功率)を測定した。その結果、遅延が変動する環境では成功率が約50%だったが、同機能を活用することで成功率は約80%に向上したとのことだ。