「ローカル5Gの用途については様々なものを考えているが、現状でその特性に最もフィットし、かつ使えれば非常にありがたいのがAGV(自律走行型ロボット)の遠隔操作だ。まず、これをしっかりと検証して使えるようにしたい」
そう語るのは、DMG森精機の常務執行役員で、SSEPカンパニープレジデント兼ICT本部長を務める太田圭一氏だ。

DMG森精機 常務執行役員 SSEPカンパニー プレジデント 兼 ICT本部長 太田圭一氏
同社は5月、NTTコミュニケーションズと共同で伊賀事業所内にローカル5Gシステムを構築し、AGV制御の実証実験を開始した。
DMG森精機は、無人搬送車に人協働ロボットを搭載したAGVを生産現場に導入し、工作機械へのワーク(加工対象物)着脱や工程間搬送等に活用している。今回の共同実験では、この制御を行うコントローラーとAGV間の通信にローカル5Gを使う。受信強度の測定や干渉状況の調査といった電波伝搬試験、遅延やスループット性能、誤り率等を測定する通信品質試験のほか、安定性の評価、AGV稼働状況の見える化などのテストも実施する。
Wi-Fiと比較し“圧倒的な差”実験においては、ローカル5GとWi-Fiの比較を行っている。「スピードがかなり違う。5Gの有効性が改めて確認できた」と、太田氏は早くも手応えをつかんだ様子だ。
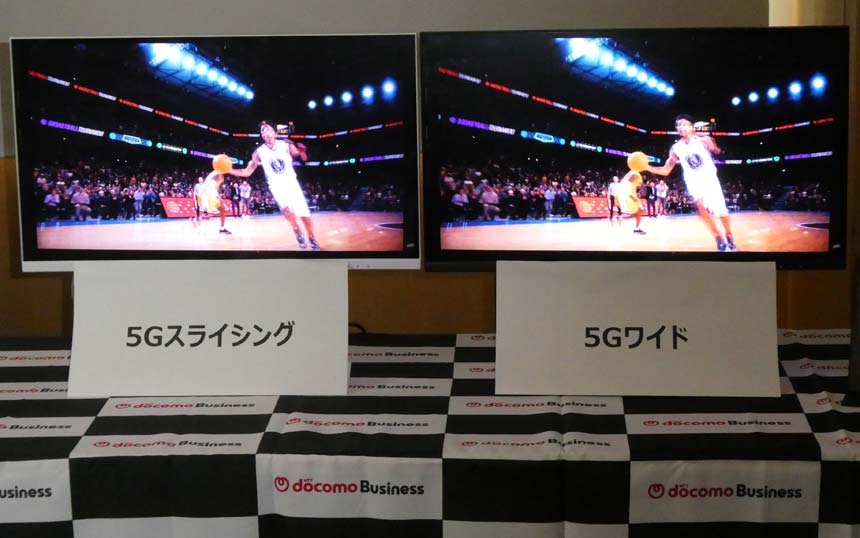
下の画像は、AGVに搭載されているレーザーを使って周辺環境をスキャンし、そのデータをコントローラーへ送信している場面だ。ローカル5G(左側)を使った場合に、Wi-Fi(右側)に比べて圧倒的に高速なマッピングが可能であることがわかる。
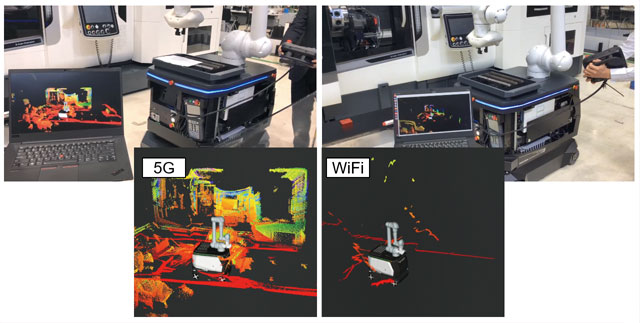
AGV周辺状況のマッピングの様子。左がローカル5Gで、Wi-Fi(右)に比べて高速にマッピング処理が行われている
AGVは、司令塔役のコントローラーがAGVの周辺環境を把握しながら作業指示を送って制御する仕組みとなっている。周辺環境を把握するマッピングの速度・精度が向上すれば、「ロボットの運転速度もアップするので生産性に大きく影響する」(同氏)。実験はまず1台のAGVを制御するかたちで実施しているが、「実用段階ではおそらく複数台を制御することになる。効果はさらに大きくなるはずだ」。
実験環境となるローカル5Gシステムの構築と運用は、NTTコミュニケーションズ(以下、NTTコム)が担う。伊賀事業所の工場内にコアネットワーク設備と28GHz帯の周波数を用いる無線基地局を1台設置。AGVに搭載する5G端末も含めてNTTコムが提供している。

伊賀事業所にある「DMG森精機 伊賀グローバルソリューションセンタ」。
AGV遠隔制御ソリューションもここで展示し、ローカル5G活用の取り組みを紹介する予定だ
AGVのコントローラーは施設内のエッジサーバーで稼働しており、データを外部に出すことなくクローズドな環境で実験を行っている。「将来的に5Gが様々な場所で使えるようになれば、離れた工場内のAGVを遠隔で動かすことも可能になるかもしれないが、それには危険も伴い、トラブルが発生した場合の対処も難しい。当面は工場内で完結するかたちで運用するのが現実的」だからだという。