ソフトバンクと東京海洋大学の後藤 慎平助教らの研究チームは2023年3月3日、画像処理によるトラッキング技術を活用した可視光の無線通信技術によって、水中の狭隘空間を移動する水中ロボットをリアルタイムで遠隔制御する実証実験に世界で初めて成功したと発表した。北海道厚岸翔洋高等学校の柴田耕一郎教頭の協力の下、厚岸湖(北海道厚岸町)で実施した。
本実証実験では、水中ロボットや水中のIoT機器等を遠隔制御するため、地上の通信ネットワークではカバーできない海域までカバレッジを拡張するNTN(Non-Terrestrial Network、非地上系ネットワーク)を連携。Thuraya Telecommunications Companyの通信衛星を利用し、実験場所の厚岸湖とソフトバンク本社(東京都港区)の間を接続して、水中ロボットをリアルタイムで遠隔制御する世界初の実験を行い、成功した。
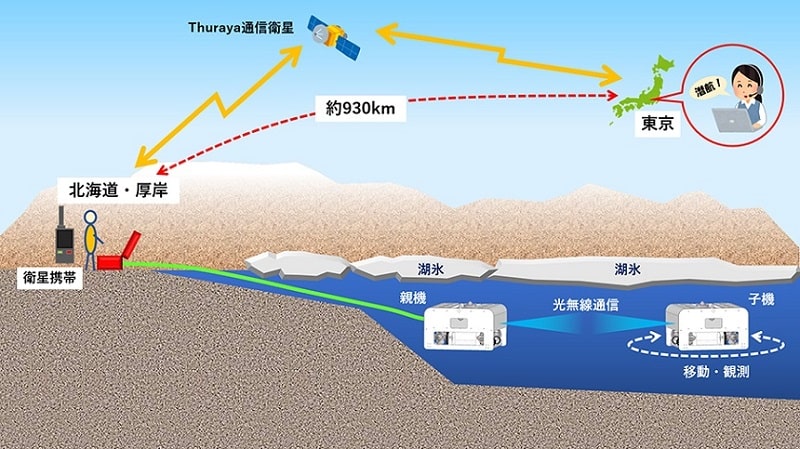
NTNとOCCによる水中ロボットの制御実験のイメージ図
水中無線通信には、光の明滅を信号に変換する技術であるOCC(Optical Camera Communication)を採用している。
光無線通信では、送信機と受信機で双方の光が見えていることが求められる。高速通信を実現するには照射角が狭い高出力のレーザー光を使って光軸を合わせ続ける必要があり、移動体等との通信には高精度な光トラッキング技術が必須だ。
ソフトバンクと東京海洋大学は、高精度な画像処理によるトラッキング技術や光の明滅から信号に変換する技術であるOCCによる、水中ロボットの遠隔制御技術を開発。遠隔地に展開する無人ロボットに対してThurayaの通信衛星を利用した無線通信を経由して制御命令を送信し、OCC信号に変換して他の無人ロボット等の制御や観測データの取得を行うものだ。
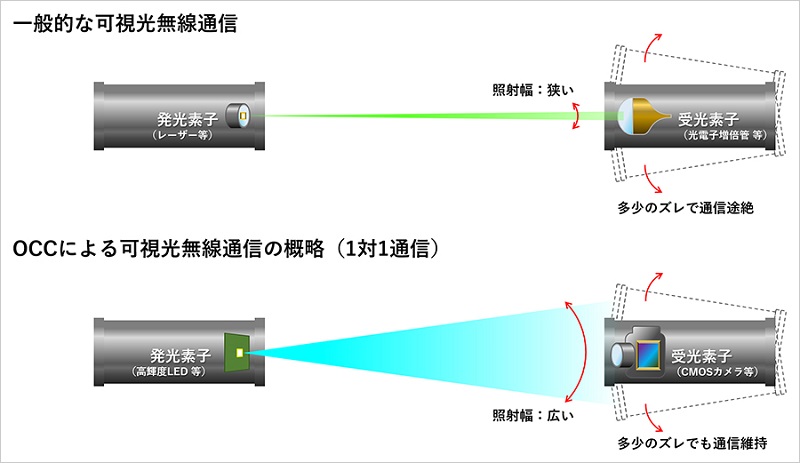
一般的な可視光無線通信とOCCによる可視光無線通信の概略図
今回の実証実験では、水面に分厚い氷が張った水中の狭隘空間で、2台の水中ロボットを遠隔地(ソフトバンク本社)から自在に制御する(潜航、浮上、前進、後進など)実験を実施した。
制御命令は衛星携帯により音声で伝送されると、厚岸湖上に設置した水中ロボットの指令システムに入力され、OCCの発光信号として子機に伝送される。子機側でこの信号を変換し、水中ロボットを上下・前後・左右方向へ自由に動かすための装置等を制御して、機体を動作させる。動作が完了すると、子機から親機へ信号をOCCで伝送。親機は衛星携帯を介して、遠隔地の操縦者に状況を知らせる。
また、子機に搭載された水温計や深度計のデータも、OCCおよび衛星携帯を使って遠隔地の操縦者に伝送。音声通信だけでなくデータ通信による制御にも対応しており、地域や海域のサービスの状況に応じて最適な通信を組み合わせることで、水中機器との安定した通信を実現できることを実証した。