NTTドコモと慶應義塾大学ハプティクス研究センター(以下、慶大)は、商用5Gを用いて「物に触れた手応え」を伝えられるロボットの高精細な無線遠隔操作の実証実験に成功したと発表した。
実証実験では、低遅延スライシング技術の一つである「Configured Grant」を適用し、慶大が開発したロボティクス技術「リアルハプティクス」と組み合わせた(参考記事:ドコモと慶大、商用5Gを用いた「物に触れた手応えが伝わるロボット」の遠隔操作を実証|BUSINESS NETWORK)。発表によれば、商用5G経由でConfigured Grantの有効性をロボット遠隔操作で実証したのは世界初という。
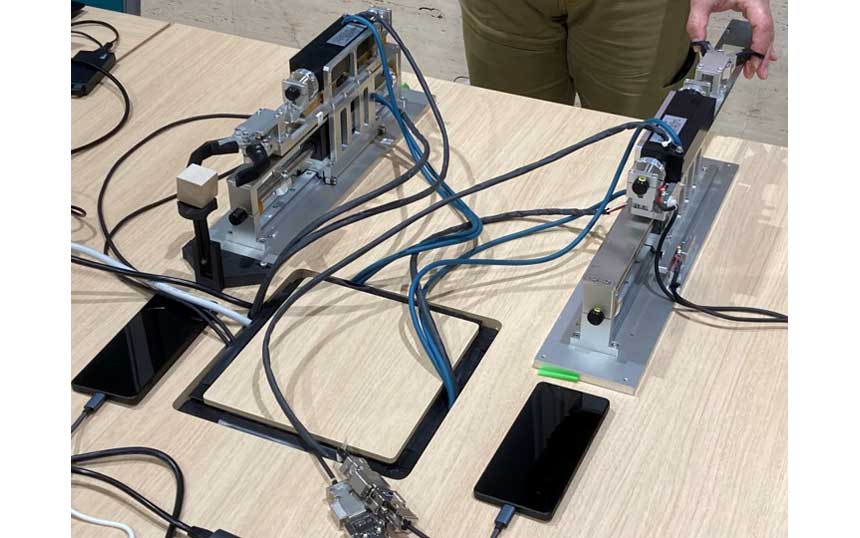
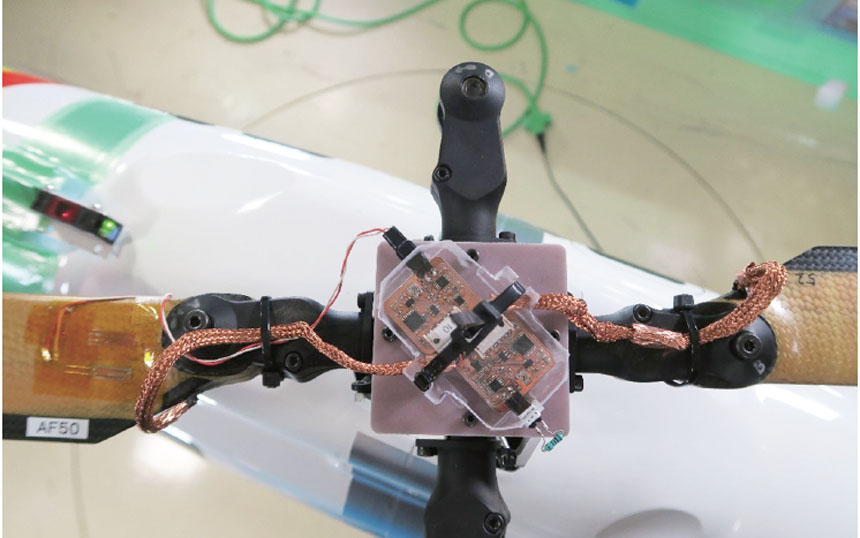
実験に用いたロボット。ハンド型のフォロワーとその操作部であるリーダーを用いて、硬い木片を把持したあと、ハンドを素早く操作して印加する力を変動させながら定められた時間内に運搬するという定型的なタスクを実施
Configured Grantは、基地局が特定端末に対してあらかじめ無線リソースを割り当てる通信スケジューリング方式。端末が送信のたびに割り当て要求を行う必要がないため、無線区間における遅延や遅延変動(ジッター)を抑制できる。ネットワークスライシングの中でも、特に低遅延性が求められる用途への適用が想定されている。
一方、リアルハプティクスは、操作者側の操作ロボットと遠隔地の作業ロボットの間で力覚情報を双方向に伝送し、人の力加減をロボット上で再現する技術。遠隔ロボットが物体をつかんだ際の力各情報を操作者に伝えるには、低遅延かつジッターの少ない通信環境が不可欠で、遅延が大きい場合は動作や力覚の同期が崩れ、操作性が低下する。
今回の実証では、商用5Gの無線区間にConfigured Grantを適用し、その遅延改善効果とリアルハプティクスへの有効性を検証した。その結果、リアルハプティクスロボットの実用的な遠隔操作に求められる通信遅延要件を達成するとともに、力の再現性や操作性が向上することを確認した。具体的には、Configured Grant未適用時と比較し、力触覚再現率は40%向上、ロボット操作の滑らかさ指標は59%低下し、より滑らかにロボットを操作できることを確認したとしている。
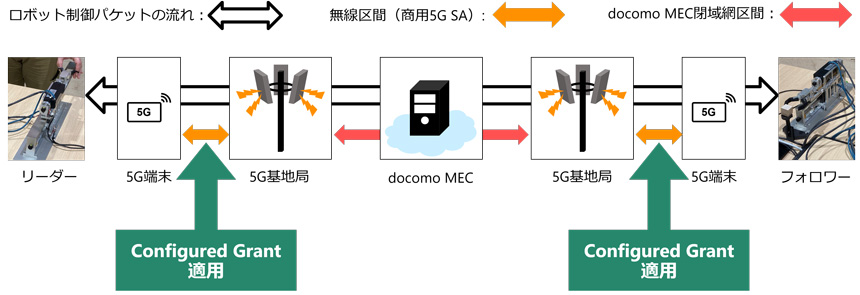
実証実験の構成図
実証の結果から、通信混雑の影響を受けにくい形で、繊細かつ高度なロボット操作を安定的に実行できる見通しを示したとしている。両者は今後、ロボットの無線遠隔操作の早期実用化に向けて技術開発と検証を継続する。
この取り組みは2026年3月にバルセロナで開催されるMobile World Congress Barcelona 2026のNTTグループブースで展示される予定。