NTT東日本、NTTドコモビジネス、NTTドコモソリューションズ、NTTデータグループ、富士通グループの1Finity、三菱ケミカルの6社は2026年6月1日、IOWN APN(オールフォトニクス・ネットワーク)や60GHz帯無線LAN(WiGig)、フィジカルAIなどを活用したスマートメンテナンスの実証成果を発表した。
実証では、三菱ケミカルの岡山事業所からNTTグループ東京都内ビル間(約700km)に、NTTドコモビジネスが提供する 「docomo business APN Plus powered by IOWN®」 を活用して、IOWN APN環境を構築。あわせて、岡山事業所構内に複数のWiGigアクセスポイントを配置し、約150m×150mのエリアで広域無線通信環境を構築した。この通信環境下で、異なるロボット2台の遠隔操作および自律走行を実現し、取得した映像データと音響データをリアルタイムにAIで解析して、振動と音に関する異常やひび割れを検知できるか実証した。
なお、端末主導動的サイトダイバーシティ制御技術(高速移動体に対して無瞬断で大容量伝送を行うことを可能とする無線通信技術)を採用し、WiGig装置を搭載したロボットがエリア外周を走行する際、最適なアクセスポイントを瞬時に選択・切り替えることで、ロボットが動き続けられる安定した環境を実現した。
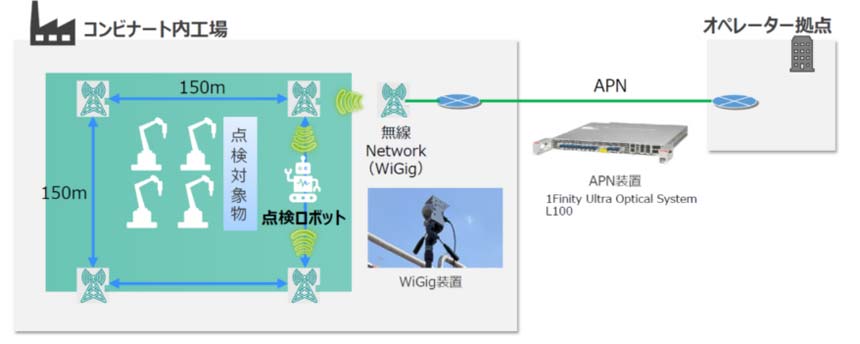
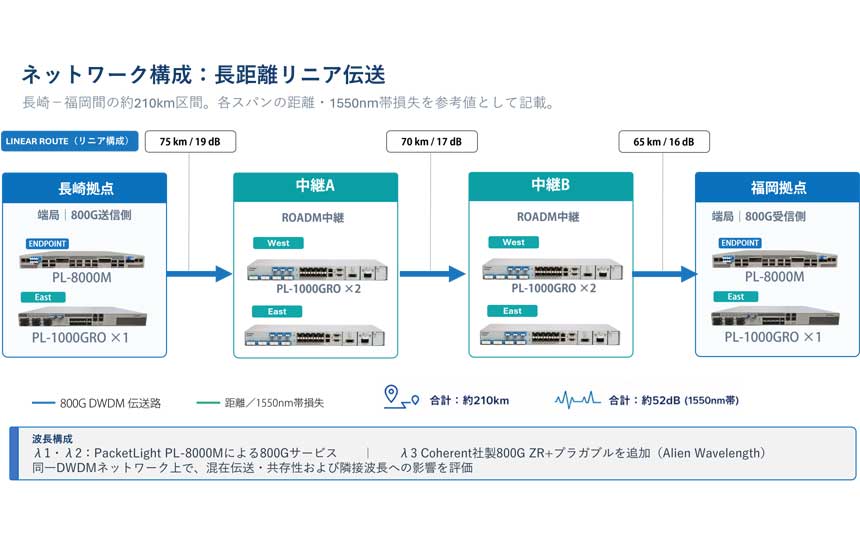
検証で用いた通信環境
この通信環境を用いて、東京都内ビルにいるオペレーターが、岡山事業所にある四足歩行ロボットの遠隔操作を実施。人の補助なく150m×150mの外周を一周でき、通信が遮断された場合にはロボットが安全に停止することを確認したという。また、ロボットはセンサーのみで地図を生成しながら自己位置を見失うことなく外周を走行し、ロボットが障害物(人や物)を認識して回避できたとのこと。

(左から)走行中の四足歩行ロボット、ロボットが取得した映像
無線通信環境下でロボットが取得した映像データは、岡山事業所から東京都内ビルまでIOWN APNを介して送信した。ロボットが走行中であっても、映像遅延時間は目標の500ms以内を達成したという。また、ロボットがポンプ機と配管の近くで撮影・集音したデータをAI解析することで、普段とは異なる何らかの異常が発生していることを検知。これは、配管に取り付けられたセンサーからの数値と目立った差はなかったそうだ。

データ収集中の四足歩行ロボット
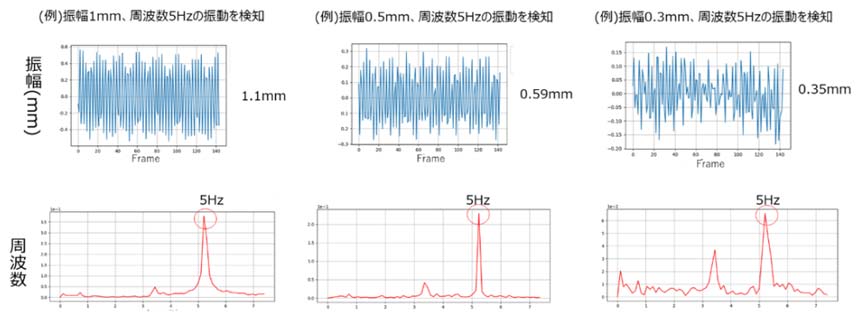
映像データからの振動解析の結果(一例)
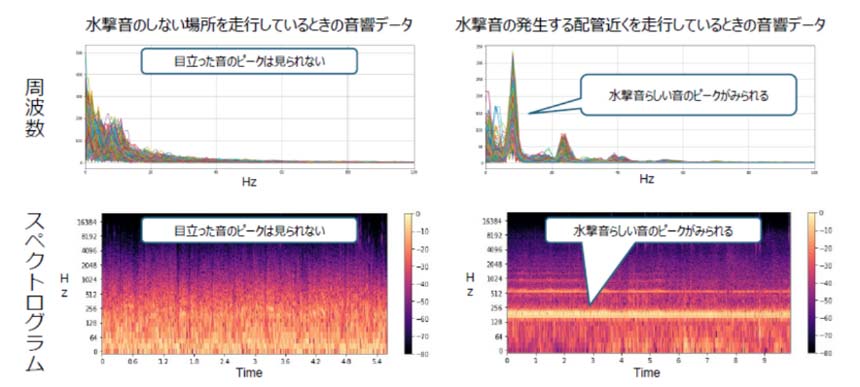
音響解析の結果(一例)
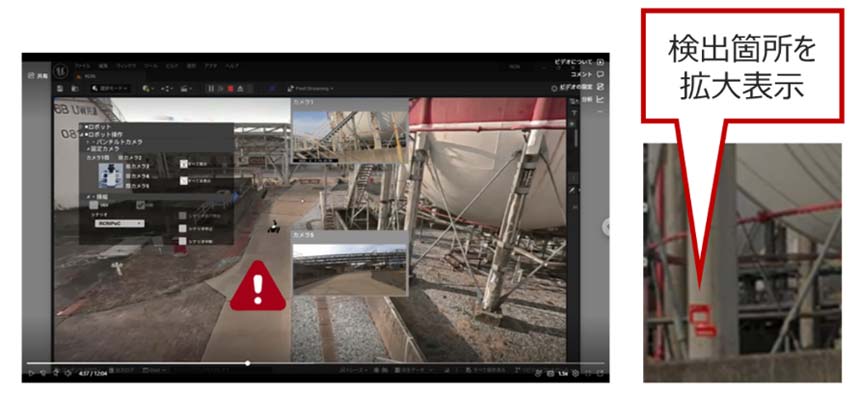
さらに、自律型の四輪駆動ロボットを150m×150mの外周を一周させることで、3D空間マップを作成し、デジタルツイン環境の基礎を構築。次に、ロボットが取得した高精細なストリーミング映像データをIOWN APN経由で岡山事業所から東京都内ビルへ送信し、画像認識AIで解析した後に、デジタルツイン環境へ反映した。
検証では、コンクリートのひび割れ情報がデジタルツイン環境に即時可視化され、当該画像を押下することでひび割れ状況の詳細を確認。 その際、映像データ取得からAI解析、デジタルツイン環境への反映まで一連の流れは500ms以下で実現でき、さらに映像伝送におけるパケット損失についても0.1%以下という高い安定性だったとのこと。将来的にひび割れに進展する可能性のある微細なひび割れも検出できたという。