5Gネットワークやデータセンター、金融取引、産業機器制御など様々な場面で正確な時刻管理を行うための技術として普及している時刻同期。産業・社会インフラを支えているこの技術が、6G時代に向けて進化しようとしている。移動体を含めたデバイス同士が高精度に時刻同期しつつ、互いの位置関係をも把握できる「時空間同期」だ。
その研究開発を進めるのが、情報通信研究機構(NICT)である。電磁波研究所 電磁波標準研究センター 時空標準研究室 主任研究員の志賀信泰氏は、時空間同期の可能性について次のように話す。
「工場のような特定のアプリケーションエリア内で、多数のデバイスが時刻同期し、互いの位置関係も知っている状態。言い換えると、1つの座標軸を持ち、その上でいつどこにあるかという共通認識をみなが持っている状態が時空間同期だ。これにより、複数のロボットが協調して1つのモノを作るといったことができるようになる」

情報通信研究機構 電磁波研究所 電磁波標準研究センター 時空標準研究室主任 研究員 志賀信泰氏
目指すはIoTの次のフェーズ
例えるなら、レオ・レオニ作の有名な絵本「スイミー」で、小さな魚が集まり大きな魚のふりをして巨大マグロを追い払ったように、1つのデバイスではできないことを協力して実現しようというのが、時空間同期の目指すところだ。「現時点のIoTはデバイスが単につながっている段階。その次のフェーズとして、複数のデバイスが有機的に連携して機能する世界を目指す」(同氏)
図表1は、そのユースケースのイメージを示したものだ。
図表1 時空間同期で実現するサイバーフィジカルシステムとユースケースのイメージ
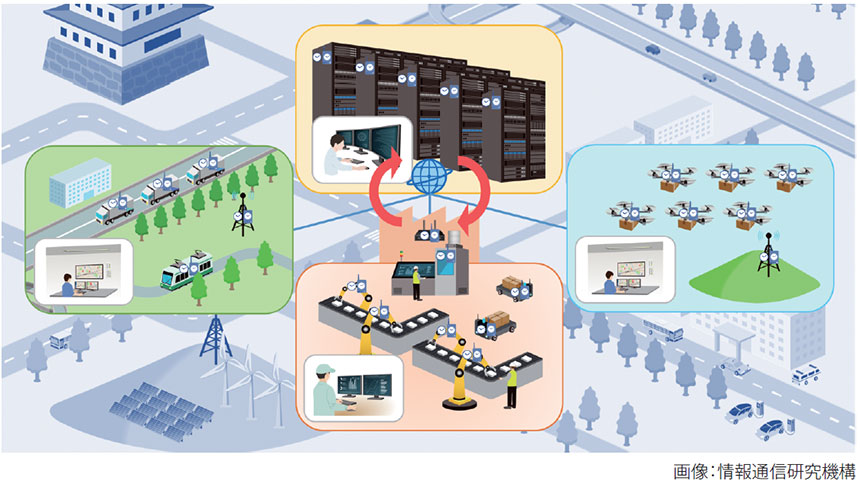
前述の工場の例では、製造機器や生産ライン、IoT機器などが高精度な時刻情報を持つことで、工場全体の状態をセンシングした情報を基に、それらをサイバー空間に再現。ロボット等の状態をデジタルツイン上でシミュレーションし、正確な時刻と位置情報を使って現実世界へフィードバックする。
このように、デジタルツインに「時空間軸」を与えることが時空間同期の最大の価値と言える。
運輸・物流の場面では、高精度測位によるドローンの衝突回避のほか、CPS(Cyber Physical System)上でのシミュレーションによる渋滞解消も可能になる。