ローカル5Gで見通し外の交通情報を提供
自動運転バスには、車両や信号などを検知するカメラやLiDARといった複数のセンサーが搭載されており、これらの情報を基に発進・停止・旋回などの走行制御を行う。
走行ルート上には、交差点付近などに計5台のスマートポールを設置。このスマートポールにも各種センサーが搭載されており、自動運転バスからは検知しづらい死角にいる歩行者や対向車などを検知・通知する。

スマートポールと車載カメラが取得した情報をもとに作成したHDマップ(高精度3次元地図)
さらに、走行ルートには計5台のローカル5G基地局を設置し、各スマートポールが取得した交通情報をローカル5G経由で集約して自動運転バスへ連携する。これにより、自動運転バス単体では把握が難しい交通情報をリアルタイムに共有できるようになったという。
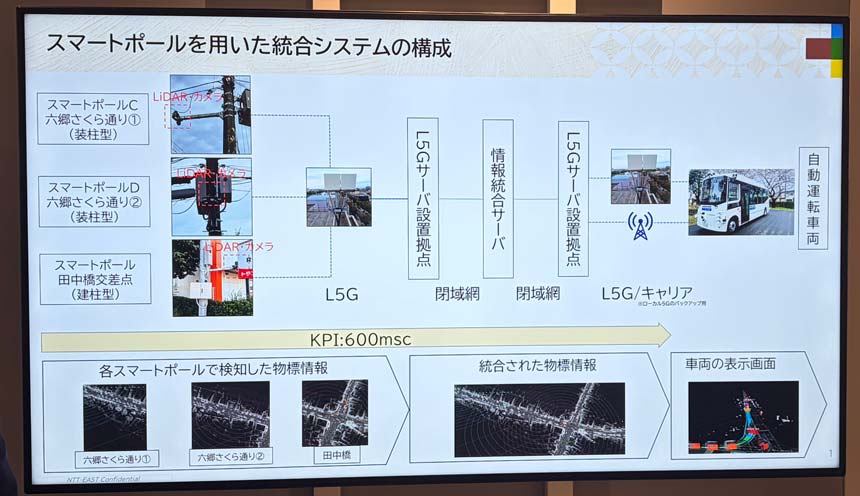
スマートポールを用いた統合システムの構成
ローカル5G基地局の電波が届きにくいエリアでは、パブリック5Gに切り替えて自動運転バスを制御する。なお説明員によれば、走行ルート沿いには高校があり、昼休みの時間帯にはモバイルネットワークが混雑しやすいが、公衆網とは独立したローカル5Gを利用することで、こうした影響を受けにくくなったという。
コンソーシアムでは、NTT中央研修センタでも自動運転バスの実証実験を行っているとのこと。こうした技術実証に加え、地域住民への受容性向上や地域の交通事業者に対する技術理解の促進などにも取り組み、2027年度以降に狛江市における「レベル4」(特定条件下における自動運転)自動運転バスの本格運行を目指すとした。