KDDI、NTTデータ、トラジェクトリー、TerraDroneの4社は2025年5月16日、同一空域内において異なるドローン運航管理システム(UTMS: UAS Traffic Management System)で運航する複数のドローン同士が衝突を回避し、安全な飛行を可能にするための運用基盤を構築する実証に成功したと発表した。実証は福島ロボットテストフィールド(福島県南相馬市)にて、2月19日・20日に行った。
実証概要
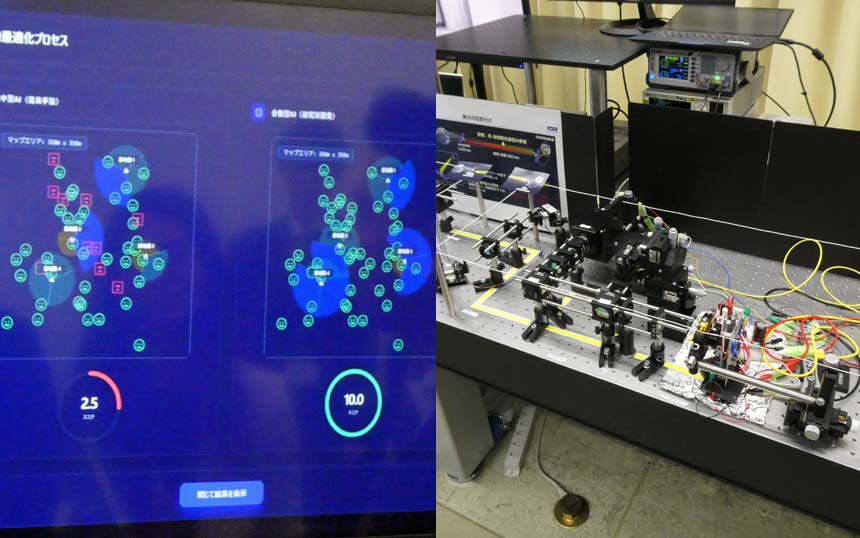
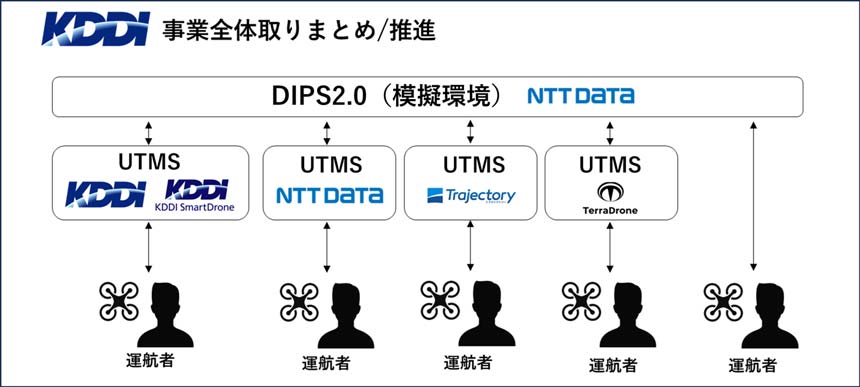
同実証は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)が推進する「次世代空モビリティ実現プロジェクト(ReAMoプロジェクト)」の取り組みの一環として行ったもの。各社が開発・構築したUTMSの運用基盤を用い、実際の災害現場を想定したシナリオを策定し、最大5機のドローンが同じエリアで飛行した。こうした環境下での飛行計画の調整やフライトステータスのモニタリング、気象情報・空域情報の連携機能について検証を実施した。
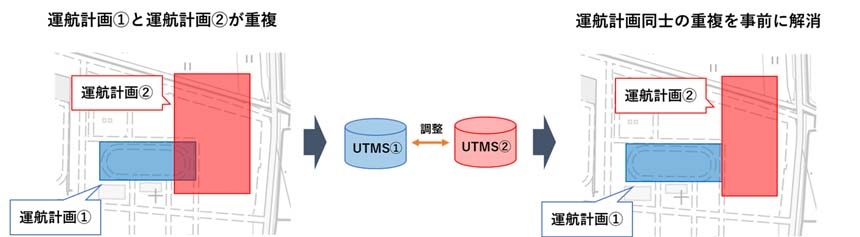
飛行計画調整のイメージ
結果、各ドローン運航者間での情報共有と飛行実態把握の正確性、システム全体の安定稼働を確認したという。実証の成果を踏まえ、複数のドローンを活用した災害時の遭難者の早期発見や被災地への物流配送などを促進していくとしている。