ソフトバンクは2024年12月20日、トラッキング技術を活用した水中光無線通信と衛星通信を組み合わせることにより、同社の本社(東京都港区)から南極(昭和基地の南方約55kmに位置するスカルブスネス・鳥の巣湾)の海氷下を移動する水中ロボットをリアルタイムで遠隔制御する実証実験に世界で初めて成功したと発表した。

実験ポイントまで移動する2台の水中ロボット
南極における海中の調査においては、技術者や研究者自身が現地に赴き、有線接続した水中航走体(ROV:Remotely Operated Vehicle)を海中に投入・操作して、海中の映像のモニタリングやデータ計測・サンプル回収などを行っているケースが多いが、これには多大な時間とコストがかかるほか、過酷な環境である沿岸の調査ポイントに長期滞在しなければならず、効率性や持続可能性に課題がある。
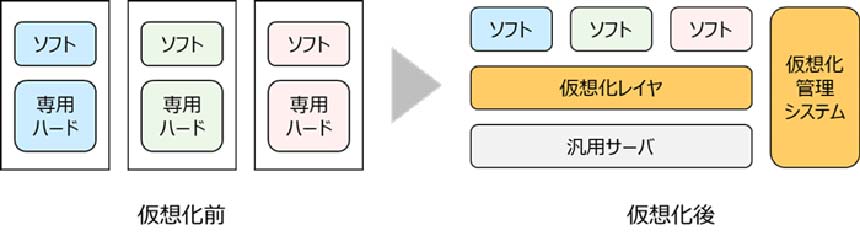
そこでソフトバンクは、光の明滅を信号に変換する技術であるOCC(Optical Camera Communication)とNTN(非地上系ネットワーク)を活用して2台の水中ロボット間で水中光無線通信を行うシステムを開発。このシステムでは、LEDの光の明滅をカメラで撮影し、画像処理を用いたトラッキング技術で光を検出・追従することで、光の輝度変化をデジタル信号に変換し、リアルタイムな通信を実現する。これにより、水中ロボットが互いに協調動作を行うための指示やデータを迅速かつ確実に送受信することができるという。
さらに、このシステムは親機となる水中ロボットとNTNで接続することで、遠隔地からコマンドを送る機能があるため、離れた場所にいるオペレーターが海洋で動作している水中ロボットに対して指示を出すことができるという。また、水中ロボットは搭載された各種センサーから得た情報を収集し、そのデータや水中ロボットの動作状況を遠隔地のオペレーターに送信することも可能。例えば、水温や水圧などのセンサー情報を取得し、そのデータを衛星通信などのNTNを通して即座に共有できるため、オペレーターはリアルタイムで海洋環境の状況を把握し、迅速な意思決定を行うことができるとしている。
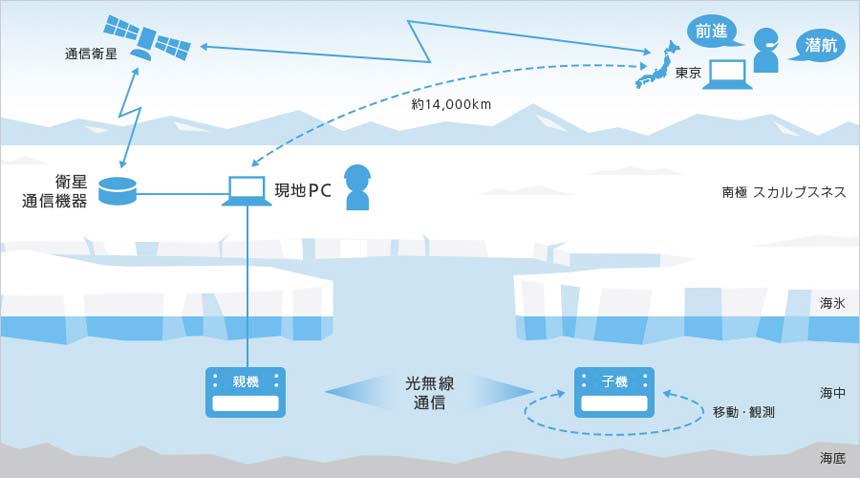
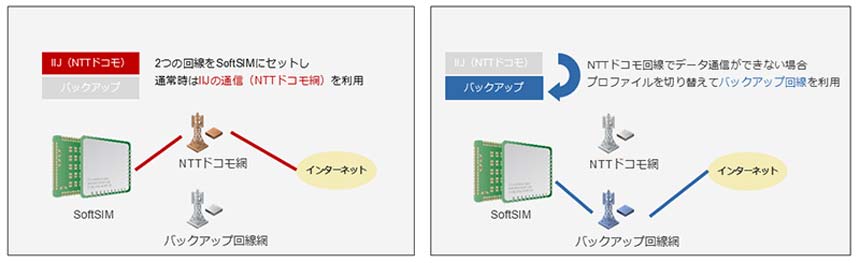
NTTとOCCによる水中ロボットの制御実験のイメージ図
この技術を活用した実証実験により、南極の海中を移動する水中ロボットを約1万4000km離れた日本からリアルタイムで遠隔制御し、水中ロボットに搭載した水温や水圧などのセンサー情報をモニタリングすることに成功。また、水温が約-2℃まで低下し、海氷に閉ざされていて音響通信の活用が難しい南極の海氷下においても、水中ロボットや機器をリアルタイムで遠隔制御するとともに、水中ロボットからのデータの収集や観測などを遠隔で実行できることを確認したという。