NECネッツエスアイは2024年3月5日、サービスロボットを群管理するための標準規格案を策定し、本社ビルにおいて複数種・複数台のサービスロボットを稼働させる実証実験を実施したと発表した。
労働力不足を解消するうえでは、同一の建物内において、異なる役割を担うサービスロボットを同時に複数台稼働させることが非常に効果的だ。しかし、それらを管理する制御システムはメーカーや機種によって異なるため、複数台のサービスロボットの群管理を実現するには、それぞれの制御システムを連携させる必要がある。加えて、エレベーター、セキュリティゲートなどの建物設備との連動や、狭路・袋小路など建物内の構造に合わせた調整が必要となるため、スムーズな導入や活用エリア拡大の妨げとなっていた。
NECネッツエスアイはこのような課題を解決するため、複数のサービスロボットが同時に進入することが困難な建物設備の使用状況や、すれ違いが困難な通路の通行状況などを「リソース管理サーバー」に集約し、制御システムとの接続に必要な仕様の標準規格案を策定した。これにより、異なる制御システム間の連携が容易になり、複数種・複数台のロボットの群管理をスムーズに実現できるという。
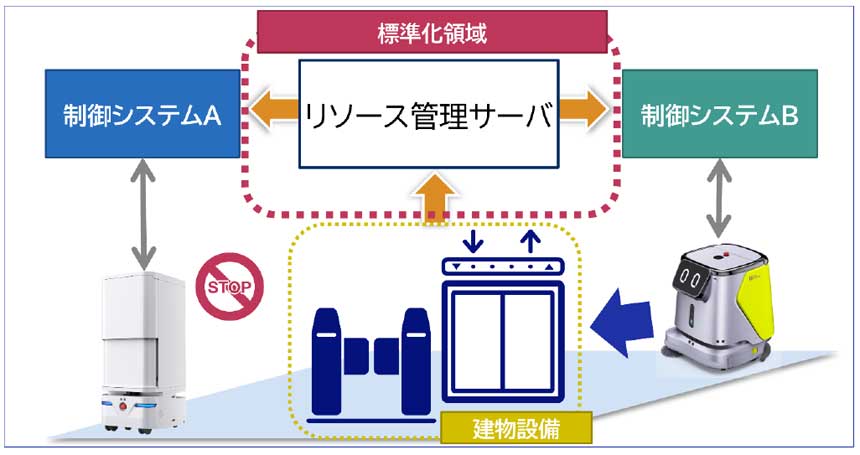
標準規格案のイメージ
今回の実証は2023年9月14日~ 2024年3月5日に、配送ロボット「YUNJI GOGO」(Beijing Yunji Technology)、清掃ロボット「PUDU CC1」(Shenzhen Pudu Technology)、案内ロボット「temi V3」(temi USA)の3種類を使って行われた。

狭路での待ち合わせ(左)、エレベーターの乗降
実証内容は、以下の通り。
・サービスロボットによるエレベーターの呼び出し、乗降、順番待ち
・サービスロボット同士の狭路での待ち合わせ、すれ違い
・サービスロボットによるセキュリティドアの通過、順番待ちなど
なお、今回の取り組みは、 経済産業省の「令和5年度革新的ロボット研究開発等基盤構築事業」に採択された補助事業の一環として実施したもの。3月5日にNECネッツエスアイ本社ビルで開催される経済産業省、日本ロボット工業会主催の「令和5年度 ロボフレ事業報告会」にて、本実証を含む成果報告を行うとしている。