ソフトバンクと東京海洋大学の後藤 慎平助教らの研究チームは2022年4月22日、世界で初めて、水中で複数の対象を自律的に追尾する画像認識トラッキング技術による1対多接続の水中光無線通信システムを開発し、リアルタイムで1対多接続の光無線通信に成功したと発表した。
実験では3台の水中光無線通信機(親機1台、子機2台)を用いた。無線通信機同士が、自動で捕捉・追尾し合って1対多接続の通信を確立・維持している状態で、子機となる水中光無線通信装置に接続された2台のROVをリアルタイムに遠隔操作する実証実験に成功したのは、世界で初めてだという。
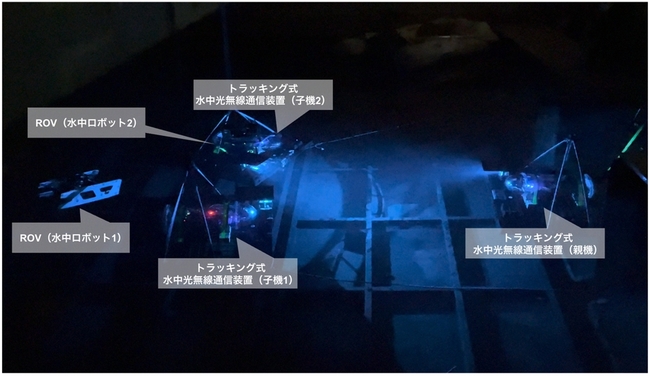
トラッキング式水中光無線通信機(親機1台、子機2台)と、各子機に接続されたROV(2台)の実験構成
近年、海中で働く遠隔操作ロボット(ROV)や自律航行ロボット(AUV)向けの水中無線通信ネットワークへの期待が高まっている。
特に高速化などを目的として、最近では水中を透過する可視光を使用した光無線通信技術に関する研究が進んでいる。光は電波よりも直進性が高いため、通信を確立・維持するためには送信機の光を受信機が常に受信できるように、常にお互いを追尾し合って、位置や向きを調整し続けるトラッキング技術が最も重要な要素の一つになる。
そこで、ソフトバンクと東京海洋大学は、水流などの影響により姿勢が時々刻々と変化する水中ロボットなどでも、送信機と受信機間で光の向きをお互いに一致させて安定的な光無線通信を実現する技術として、画像認識によるトラッキング技術に着目し、共同研究を進めてきた。
今回の実験および研究では、通信対象を捕捉・追尾する際に使用するトラッキング用カメラに、通信対象が発する光の明滅から信号を取り出す機能(OCC:Optical Camera Communication)を持たせることで、従来よりも広い画角で複数の光信号を自律的に捕捉・追尾可能な受信機を開発したという。
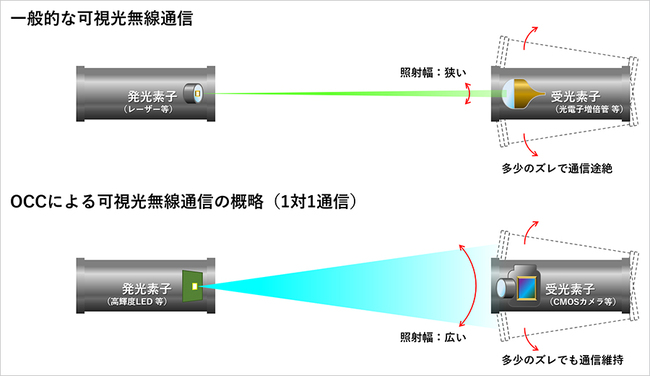
一般的な可視光無線通信とOCCによる可視光無線通信の概略図
さらに、送信側もレーザー光よりもビーム幅が広い拡散光を発する光源を採用し、トラッキング用カメラで捕捉しやすくすることで、同時に複数の通信対象を捕捉・追尾して、1対多接続の通信を実現する手法を新たに開発したとしている。