NTTは2022年2月25日、世界で初めて、60GHz帯無線LAN(WiGig)において高速移動環境下での無瞬断大容量無線伝送を実現したと発表した。
独自に考案、開発した「端末主導の動的サイトダイバーシティ制御技術」を用いて実現したもので、本技術により、WiGigなどのソフトハンドオーバー機能を持たない非移動体無線通信においても、高速移動体に対して無瞬断の大容量無線伝送が行えるようになる。NTTは、ドローン・車などのリアルタイム映像伝送や録画データの一括伝送などに活用することが可能になるとしている。
WiGigは高速な無線伝送が可能だが、ソフトハンドオーバー機能を持たないため、端末が移動しても、接続先の基地局を適切に切り替えることができない。そのため、無線伝送速度を高速状態に保ったまま、複数の無線ゾーン間を移動することが難しく、車、ドローンなどの移動体へ適用することが困難だった。
この問題に対してNTTは、切り替えタイミングと切り替え先の基地局を適切に制御する手法として「基地局切り替え制御」を考案。2021年に、上り1Gbpsのまま、500ミリ秒以内に基地局を切り替えることを実証した。
ただし、この方法では約500ミリ秒の通信断が発生するため、リアルタイム性を要する映像データや常時高スループットを要するデータ一括転送などへの適用が困難だった。
複数の無線機能部を自律的に選択・切り替え
これを解決するために考案したのが、無線端末内に複数の無線機能部を装備する「端末主導の動的サイトダイバーシティ制御技術」だ(下図表)。
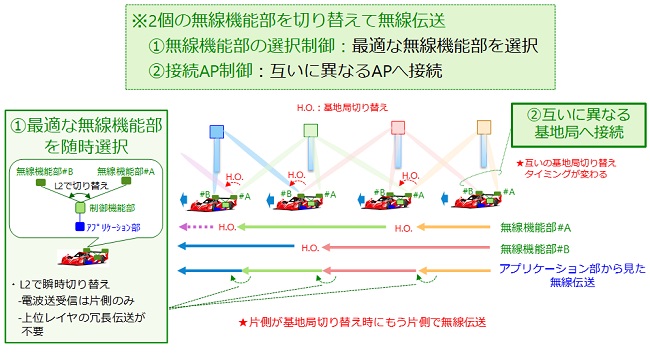
「端末主導の動的サイトダイバーシティ制御技術」の動作イメージ
移動体内のアプリケーションは制御機能部を介して複数の無線機能部と接続。各無線機能部はそれぞれが無線基地局と接続し、基地局切り替え制御を行う。合わせて、制御機能部は(1)無線品質の良い無線機能部を随時選択して切り替え、(2)各無線機能部が互いに異なる基地局へ接続するよう制御を行う。
この組み合わせにより、片側の無線機能部が基地局を切り替えている間、もう片側の無線機能部で無線伝送を行い、通信断を回避。ソフトハンドオーバー機能の無い非移動体無線通信でも、高速移動環境下において、無瞬断で大容量無線伝送を行うことが可能となる。

実証実験で用いたフォーミュラカー
本技術の実証実験は2021年12月に鈴鹿サーキットで、レーシングチーム「DOCOMO TEAM DANDELION RACING」が提供するフォーミュラカーを用いて行われた。
WiGig無線端末(無線機能部)はフォーミュラカーの両サイドポッドに、制御端末(制御機能部)はフォーミュラカーの左サイド内部の空きスペース部分に搭載。WiGig基地局は、コース上で最高速度が出るメインストレートのコース両サイドに2台設置した。
制御端末からデータを転送し、各WiGig基地局が受信するレイヤー2での上りスループットを測定することにより、性能を評価。下図表の(b)のように、「端末主導の動的サイトダイバーシティ制御技術」を適用した場合は無線伝送できていない時間帯が無く、基地局4台のゾーンに渡り無線伝送できており、複数基地局間を無瞬断で無線伝送できることを確認した。
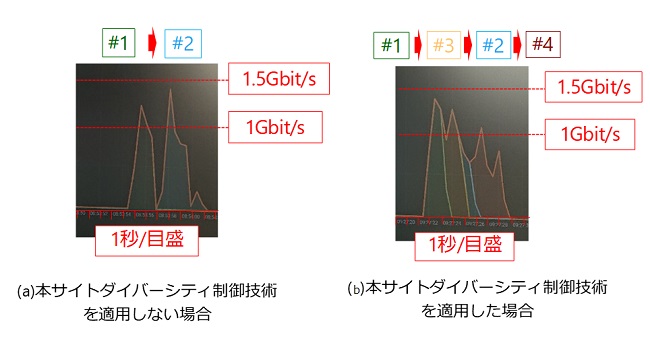
実験結果(レイヤ2での上りスループット)
なお、時速260kmの走行中でも、平均スループット1Gbps以上のまま、無瞬断に無線伝送できることも確認している。
NTTは引き続き、様々な利用環境で安定した無線伝送を実現するための技術検討を進めるほか、WiGigのみならず、6G時代に活用が期待されるミリ波・サブテラヘルツ波帯無線伝送システムへの本技術の適用検討も進めていくとしている。