NTTドコモと慶應義塾大学ハプティクス研究センター(以下、慶大)は2023年1月25日、5Gの高信頼低遅延通信(URLLC:Ultra-Reliable and Low Latency Communications)を用いた実証実験において、ヒトの手を動かして感じ取れる手応えを最大96%再現することに成功したと発表した。モバイルネットワークを用いて手の感触をロボット上で再現することが可能になることで、立ち入りが難しい場所等でのロボット活用やロボット市場の拡大が期待できるという。
今回の実証は、慶大が開発したロボティクス技術「リアルハプティクス」を活用したロボットの無線遠隔操作実現に向けたものだ。
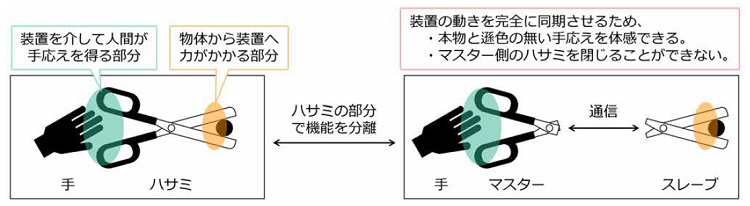
リアルハプティクス技術によって指先や手のひらで手応えを感じ取れる仕組み
リアルハプティクスとは、ヒトの指先や手のひらを動かして感じ取れる手応えをロボット上で再現する技術で、その実現には低遅延な通信状態を変動なく保つ必要がある。今回の実証では、5G URLLCを活用することで遅延時間の変動を抑制。ロボットの無線遠隔操作において、物体を直接つかむ手応えに限りない水準である再現度96%を達成した。
具体的には、操作される側の装置(スレーブ)にかかる作用力を、操作する側(マスター)へ再現できている度合いを手応え量と定義し、スポンジをつかむ把持動作の手応え量を測定。5Gの高速大容量通信(eMBB:enhanced Mobile Broadband)を介した場合と、URLLCを介した場合の再現率を検証した。
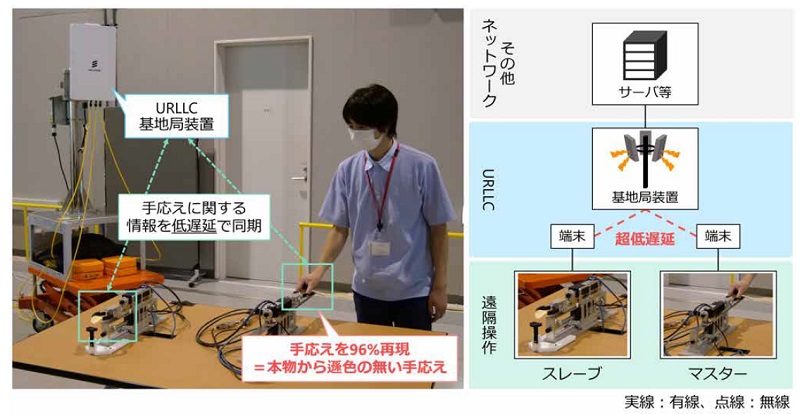
URLLC実験装置を介したリアルハプティクス制御ロボットの遠隔操作
検証の結果、URLLCを介した場合は96%の手応え量を再現した。また、伝送距離の長さを模擬するため、ネットワークエミュレータによる固定遅延を追加した場合でも、その追加量が30ms(ミリ秒)以下の場合は80%程度の手応え量を再現できており、この数値は、有線通信で得られる手応え量とほぼ同等という。
eMBBを介した場合は、固定遅延の量に関わらず手応え量は平均で43%となった。要因は無線区間で発生するゆらぎであり、この結果、現在の商用5Gでは精細な手応えの再現が困難であることが裏付けられたとしている。