ヒューマノイドで「多能工型」を目指す
ヒューマノイド型ロボットを使って現場の作業を自動化するフィジカルAIの取り組みについても紹介した。
梅津氏によれば、従来の産業用ロボットの動きはルールに基づくプログラムや、人がロボットの腕を直接操作して動きを覚えさせる「ティーチング」によって作られていたが、近年は人間の動きを撮影した映像から、ロボット自身に動き方を学習させる手法が登場しているという。リコーもこの技術を取り入れ、AWS上に学習環境を構築している。
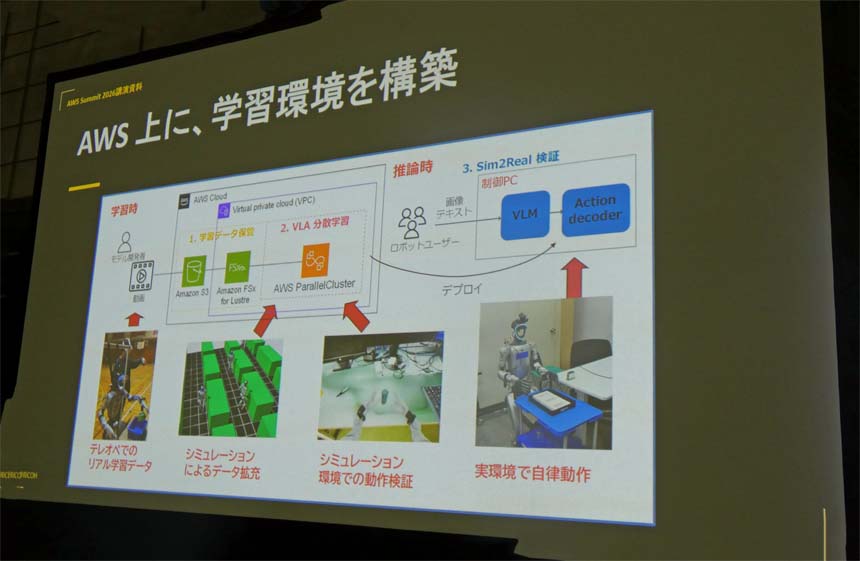
AWS上に学習環境を構築し、ヒューマノイド開発を行っている
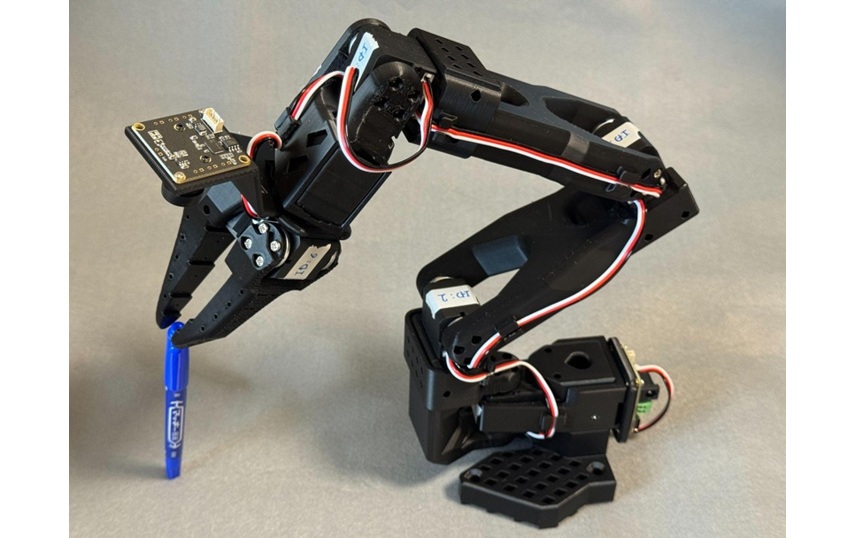
具体的にはまず、学習データの取得のために、ヒューマノイド型ロボットの背中にセンサー付きのコントローラーを取り付け、操作者がそのコントローラーを介して自分の腕の動きをロボットに伝え、ロボットを操りながら、実際の作業を行う。この様子を映像として記録することで、操作者の動きがそのままロボットの動作データとして残る仕組みだ。
こうして集めた動作データを、リコー製の360度カメラで工場内を撮影して作成した仮想空間に入れ、AWS上に構築したシミュレーション環境の中でロボットの3Dモデルを動かしているという。記録した動きを何度も再生・学習させることで、ロボットが同じ作業を自律的に行えるようにしている。学習を終えたロボットを実際の厚木工場に持ち込み、電子部品をトレーに乗せて搬送する作業や、部品を選び出すピッキング作業を自動で行わせる実証を進めているという。
梅津氏は、「特定の作業しかできない単機能の工場ロボットとは異なり、現場への移動や搬送、ピッキングなど複数の作業を一台でこなせる多能工型のヒューマノイドを目指している」と説明した。
リコーでは今後も現場での実証を重ね、ヒューマノイドの実用化を進めていく方針だという。