情報通信研究機構(NICT)とテクノ菱和は2025年6月17日、インパルス型超広帯域無線(IR-UWB)を活用し、事前の地図作成なしで自律走行ロボット(AMR)を簡便に制御できるシステムを共同開発したと発表した。

AMR動作検証実験の様子
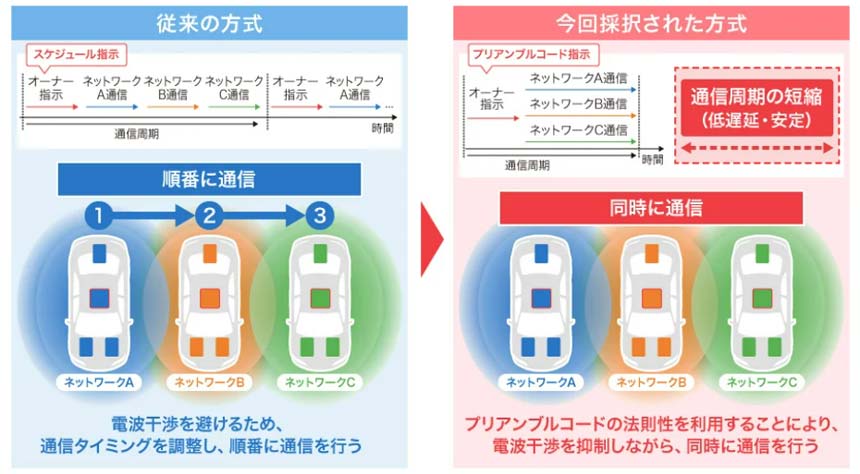
今回開発された自律走行システムでは、目標地点に配置されたIR-UWB端末(目標端末)と、ロボット上の端末(移動端末)間でリアルタイムに距離を計測。NICTが開発したアルゴリズムにより、2点間の距離情報から目標までの方向と距離を算出し、テクノ菱和が開発した駆動制御技術でロボットを誘導する。これにより、煩雑な座標設定やエリアマップの作成を不要としながら、20cmの精度で複数地点を連続して走行できる。
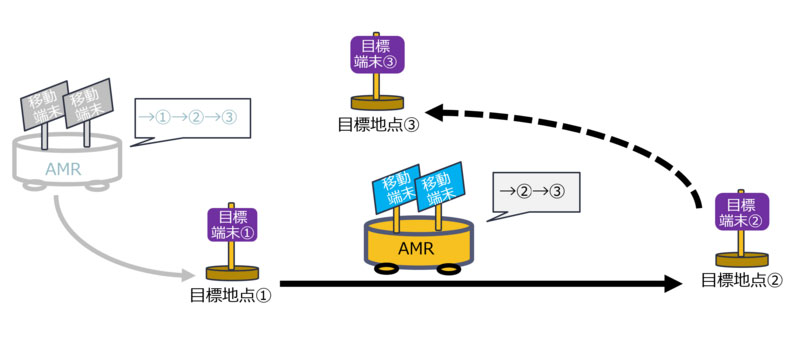
AMRが複数の目標地点に連続で自律走行するイメージ図
同システムはクリーンルームの環境計測作業の省力化につながるという。クリーンルームでは空気中の微粒子濃度の測定を行うが、清浄度に影響を与えないためにAMRでの測定が望まれる。従来のLiDARベースのSLAM方式は、ステンレス製の壁面など反射物が多いクリーンルームでは誤作動を招きやすく、床面に誘導テープを貼る方式も床を汚染することから使用が難しかった。このシステムはこうした課題を回避しつつ、発塵リスクを最小化した高精度測定を実現する。測定作業を夜間や休日に移すことで、清浄度維持と施設の稼働効率向上にもつながるという。
今後は、測位・駆動制御部のCPU統合によるシステムの小型化と効率化を進め、物流や建築現場での自律作業ロボットへの応用も視野に入れるという。開発した技術は、6月20日から開催される「NICTオープンハウス2025」で公開される予定。