アメリカ航空宇宙局(NASA)の有人宇宙飛行プロジェクト「アポロ計画」。1969年に有人宇宙船「アポロ11号」が打ち上げられ、人類史上初めての有人月面着陸に成功した。しかし、アポロ計画の最終飛行となった1972年の「アポロ17号」を最後に、人類は月に足を踏み入れていない。
それから半世紀以上、人類は再び月を目指している。NASAは現在、月面での持続的な探査活動を行う「アルテミス計画」を推進中だ。同計画では、2026年9月の有人月面着陸を予定している。
アルテミス計画には日本も参画し、宇宙航空研究開発機構(JAXA)が中心となって生命維持システムや有人与圧ローバーなどの研究開発を進めている最中だ。
また、アルテミス計画が推進されていくなかで、「月通信にかかる検討や水資源を含めた資源探査、非宇宙産業を含めた民間事業者の宇宙開発への参画を促し、国際競争力を獲得していくこと」を目的に、政府は今年3月にはJAXA内に「宇宙戦略基金」を新設。民間企業や学術機関などに対して今後10年間で1兆円規模の支援を行う計画だ。
総務省も宇宙戦略基金を使って、月面の水資源探査(月面センシング)技術や、月-地球間通信システムなど、月をターゲットにした研究開発を支援する。
情報通信研究機構(NICT)が昨年3月に刊行した「Beyond 5G/6Gホワイトペーパー」では、2030年以降の未来社会のシナリオの1つとして、「月面都市」が挙げられている。
「1960年代末までに月面に人間を着陸させ、安全に地球に戻すこと」を目標に策定されたアポロ計画とは異なり、アルテミス計画では、アバターロボットや有人与圧ローバーなどを活用した月面の資源探査活動も行われる予定だ。
またNICTは、衛星上にWebカメラを設置して地上からリアルタイムの宇宙の姿を観測できる「宇宙版ストリートビュー」や、6Gを通じて月滞在中に撮影した動画像を地球に送るといった「月旅行」など、アルテミス計画の“その先”も見据えている(図表1)。この活動を下支えていくのがBeyond5G/6Gになるというのが、NICTが描く人類の月面活動の未来だ。
図表1 地球からの宇宙版ストリートビュー
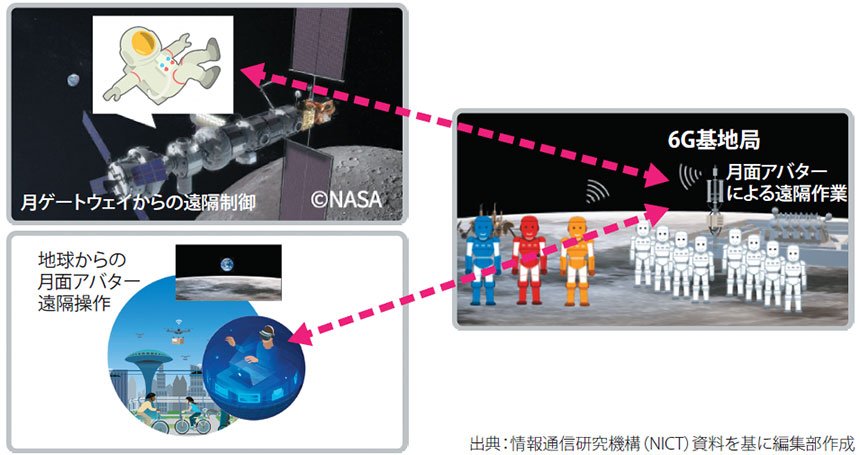
資源探査活動において月面に大勢の人を送り込むことは難しいため、月ゲートウェイ(月周回有人拠点)や地球から月面のアバターロボットなどを遠隔操作・制御することが必要になる(図表2)。また、地球からの指示は数秒単位の遅延が発生する。これらの課題を解決するのが6Gである。
図表2 月面アバターによる遠隔作業
では月に関する通信技術はどのように実用化されていくのか。
「まずは月面にローカルの通信環境を構築するところから始まるだろう」とNICT Beyond 5G研究開発推進ユニット Beyond 5Gデザインイニシアティブ イニシアティブ長の石津健太郎氏は予測する。その後、リアルタイム性が求められるニーズに応じ、月-地球間通信が作られていくというのがNICTの考えだ。

月-地球間通信は、前述したアバターロボットの遠隔操作に不可欠だが、「月のデジタルツイン」を地球上に再現する際にも重要な役割を果たす。デジタルツインを構築するには、月面で収集した大容量のデータを地球へ伝送する必要があるからだ。
ただ、「デジタルツインを作るためのデータ伝送は、必ずしもリアルタイム性が必要になるわけではない」(石津氏)。月-地球間通信の要素技術としてどのような技術が必要になるのか、今後さらなる議論が交わされていくと予想される。