NTT Comは、NTTドコモグループの法人事業ブランド「ドコモビジネス」の一環として、法人向け5Gサービスを提供している。顧客要望に基づいた5Gエリア構築も行っており、年間で250~300のエリア化を実施しているという。
同社が提供する法人向け5Gサービスの利用状況について、映像関連とXRがそれぞれ約3割を占め、「全国で累計2500件以上の受注を頂戴している」とNTT Com プラットフォームサービス本部 5G&IoTサービス部 5Gサービス部門 部門長の岩本健嗣氏は語った。

法人顧客の要望に基づいた5Gエリア化は、工場などのプライベートエリアやイベント会場で行われている。自転車ロードレースイベント「JAPAN CUP CYCLE ROAD RACE」では、移動基地局車(P-BTS)を活用して5Gエリアを構築。山間部などの電波が届きにくい場所の通信品質を確保したという。

映像関連では、病院間の映像伝送に5Gが使われている。具体的には、八丈島の「町立八丈病院」と東京の「都立広尾病院」を5Gでつなぎ、高精細映像伝送システム「Zao-X」を用いて患者の映像データを伝送。これにより、都内にいる専門医が遠隔からリアルタイムに診療支援が行える。

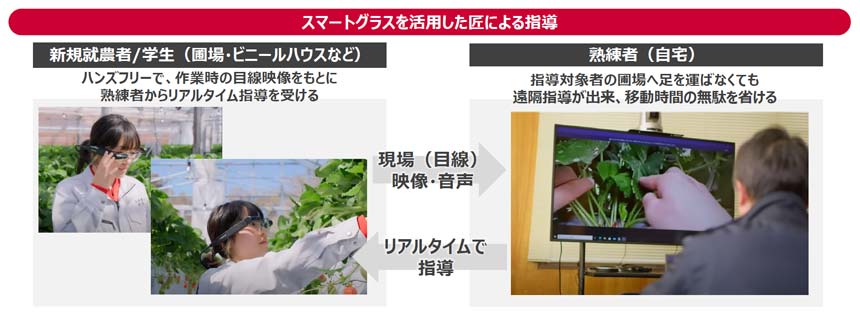
XRについては、福岡のブランドいちご「あまおう」匠の技能継承に5Gが活用されている。スマートグラスを着用した新規就農者と遠隔の熟練者を5Gで接続。新規就農者はスマートグラスに投影された映像をもとにリアルタイム指導を受けられるうえ、熟練者も遠方の圃場やビニールハウスに赴く必要がなくなる。
そのほか、スマートグラスを活用した災害時の現場と本部間の迅速な情報連携への5G活用や、ドローン・配送ロボットによる医薬品のラストワンマイル配送の実証などを実施しているという。