NTTとパーソルホールディングスは2023年10月31日に記者説明会を開催し、“はたらくWell-being”に関する共同実験を開始すると発表した。
コロナ禍でリモートワークなどの新しい働き方が普及したが、リモートワーク環境下では従業員同士のコミュニケーションが難しいという問題もある。
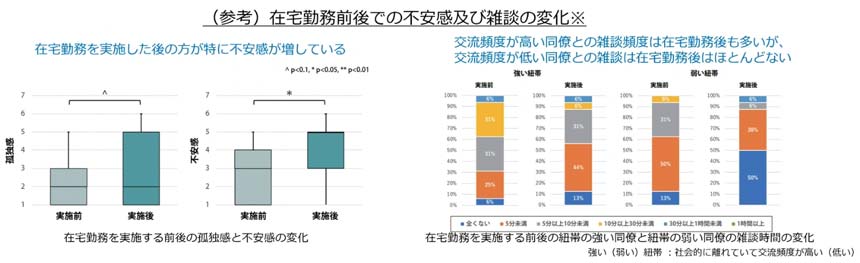
情報処理学会の調査によると、リモートワーク実施前と比べて孤独感・不安感を感じている人が増加していることが明らかになった。また、リモートワークによって交流頻度の低い同僚との雑談時間も大きく減少している。
「イノベーションに必要な“つながり”が弱くなっている。今回の共同実験では、対面とリモートワークでのコミュニケーションを両立させた、新しいあり方を検討していく」とNTT 社会情報研究所 上席特別研究員の渡邊淳司氏は意気込んだ。