NEC、内閣府、宇宙航空研究開発機構(JAXA)、三菱電機は2025年11月18日、準天頂衛星システム「みちびき」についてのメディア説明会を開催した。

今回の説明会は、みちびき5号機の打ち上げを12月7日に控え、その機能やサービスを周知する目的で開催されたもの。冒頭、NEC センシングプロダクト統括部 統括部長の吉川志郎氏は「みちびきはたくさんの企業等が協力して作り上げていく、日本の宇宙技術の結晶」と話し、各機関が取り組みを紹介した。

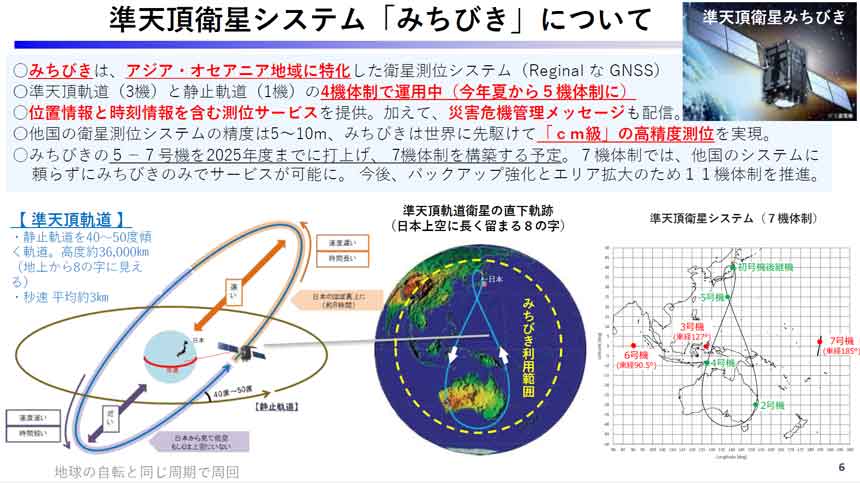
みちびきの運用主体である内閣府 宇宙開発戦略推進事務局 準天頂衛星システム戦略室 室長の三上建治氏は、みちびきのシステム構成や機能を説明した。みちびきはGPSに代表されるGNSS(Global Navigation Satellite System:全球測位衛星システム)の1つで、対象地域を日本を中心としたアジア・オセアニア地域に限定した「リージョナルGNSS」だ。現在は衛星4機体制で運営されており、準天頂軌道にある衛星が日本上空に長時間とどまることで、良好な衛星配置を確保できる点が特徴となっている。GPS単独の場合、測位精度は5〜10m程度だが、みちびきで補強することにより、cm級の高精度測位を実現できる。

政府は5号機に続き、2025年度内にさらに6号機、7号機の打ち上げを予定している。2026年度に7機体制が完成すると、みちびきのみで4機以上の衛星を常時捕捉できる構成が整う。これにより、他国のGNSS衛星に頼らない、みちびきのみでの測位が可能になり、信頼性が大きく向上する。将来的には、バックアップ体制強化とエリア拡大のため11基体制に拡張する計画だ。